
Webb Scheutzow Unusual Helicopter Designs
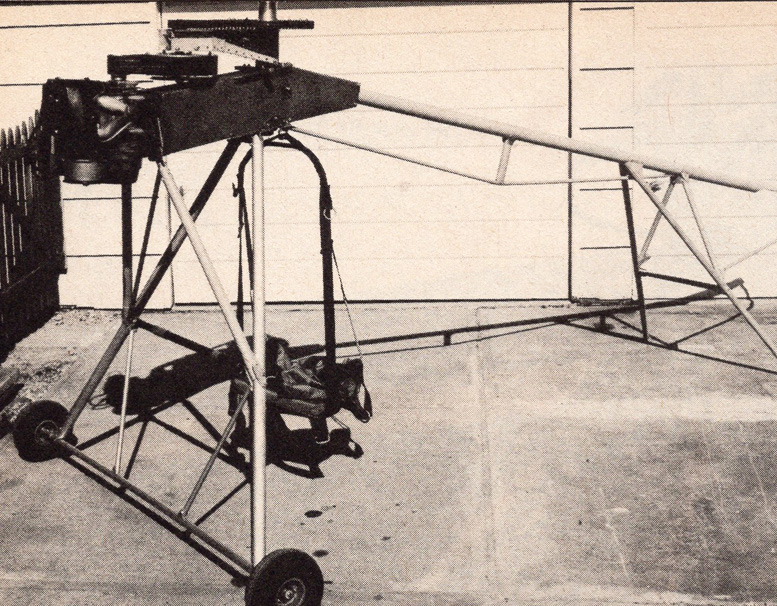
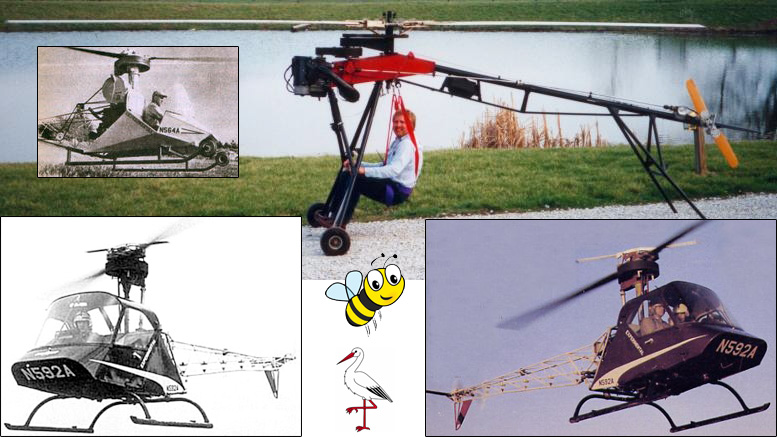
Foot-launched Scheutzow Stork ultralight helicopter prior to installation of main and tail rotor blades Note suspended seat.
“CHARLES, WOULD YOU please fly up to the roof and check the shingles?”
“I think I heard a reindeer walking around up there last night!”
“Okay. Ma. soon as I can fire up my Stork!”
ARTICLE DATE: October 1979
A pipe dream? No way The Stork is an exciting, new ultralight “hang-helicopter” introduced this summer by veteran helicopter designer Webb Scheutzow of Berea, Ohio He calls the device a “treetop” one-man, foot-launched helicopter and claims that it “opens entire new vistas in sport aviation, as well as in practical applications.”
Stork is a long-legged ultralight rotorcraft Scheutzow developed after some 25 years as an active member of the American Helicopter Society, during which time he also developed the FAA Type-Certificated Scheutzow Model B helicopter and a number of other exciting whirlybird projects.
“Stork is controlled by weight-shift,” Scheutzow explains. “You might call it a ‘hang-helicopter’ — a first of a kind Powered by a snowmobile engine, it employs a type of main rotor with special gyro stability qualities. It is foot-launched, like a hang glider, but is launched into a hover attitude.”
Scheutzow acknowledges that many past attempts to build a successful back-pack helicopter have foundered, but he says: “I made a technical study of the requirements for this type of helicopter, and my conclusions were that if we are to have a successful helicopter of 70 or 80 pounds, the engine must weigh not more than 12 to 15 pounds and have a rating of 20 hp, and there is no readily available engine of this kind.”
The nearest thing to that requirement, says Scheutzow, is the Herbranson RPV engine, which is expensive and not readily available for helicopter use Expanding his study further, Scheutzow learned that during the 1950s several successful single-place helicopters were built in the 30- to 40-hp bracket, with empty weights in the range of 275-400 pounds.
These light choppers had been built for a Marine Corps competition and have been referred to as “rotorcycles.” Three examples are the Hiller XROE-1, the Goodyear Cizmo and the Del Mar Whirly Mite.
The Scheutzow Stork development fits between the rotorcycle and the back-pack helicopter categories, being in size and power similar to the rotorcycle but having considerably lower empty weight and foot-launch capabilities comparable to the backpack concept.
Stork is designed to carry a maximum useful load of 250 pounds, but is not power-limited, and according to its designer it may in fact prove capable of lifting a heavier payload. Final gross weight limits will be determined on the basis of safe handling characteristics proven in a rigorous flight-test program.
Design considerations in development of Stork, says Scheutzow, were:
-
It is controlled by weight shift
-
You can hover it by partially loading the rotor and, like a hang glider, learn its handling characteristics by “ground flying.” Long fiberglass skids, which are removable, function like bicycle “learning wheels.”
-
Important weight saving derived from its being foot-launched and landed
-
The FAA does not require formal licensing of foot-launched aircraft or their pilots at this time
-
During the past five years, literally thousands of people have learned to fly weight-shift controlled hang gliders
-
Stork uses standard, readily available snowmobile engines.
Its main rotor has two blades mounted “rigid-in-plane.” The blades are mounted on offset flapping hinges with a “delta-three” angle, which provides automatic pitch control for both power-on and power-off autorotation flight and also provides a “flat-tracking” rotor.
There is very little change in rotor attitude under gusting conditions, says Scheutzow. Dynamics of the Stork’s configuration provide for stable, long-period motions suitable for weight-shift control.
The control bar has a twist-grip throttle control for the left hand, and a tailrotor pitch control for the right hand. An arrangement is made so that the two may be synchronized or controlled separately. Patent applications are being filed to cover all the Stork’s new features.
“The Stork” Scheutzow points out, “is truly a low-cost helicopter, something that many have attempted previously, but which no one, including myself, has until now delivered. Potentially, a quality assembly kit for Stork can be produced and marketed at motorcycle prices.”
Scheutzow’s summer schedule called for completion of hover flight tests prior to Oshkosh, where it was to be placed on exhibit, with kits offered for sale in November, after a complete flight test program.
The Stork was ready for initial flight testing in July. Webb Scheutzow’s helicopter career goes back to 1944 with Kellett Aircraft in Philadelphia, where he contributed to engineering design of the first twin-engine transport helicopter, the XR-10.
Subsequently he was employed by Hiller Helicopters in Palo Alto, California, where he participated in the design and engineering of the original overhead stick “A” Model H-23. After 11 years as a test and development engineer with General Motors’ Cadillac Division, he formed his own company and developed the Scheutzow Model B utility helicopter.
The Model B got its FAA Type Certificate in 1976, and in 1977 the Scheutzow Helicopter Corporation was sold and moved to Texas (The FAA Type Certificate H1CL for the Model B, plus parts and tooling, are again up for sale).
Since selling his former company, Scheutzow has turned to design and development of ultralight aircraft. An earlier project, the homebuilt Scheutzow Hawk 90 and Hawk 140 helicopters, also has been shelved. The Stork, his latest project, looks like a winner, with the booming interest in ultralight aircraft.

Scheutzow’s 1963 90-hp BEE flying test bed helicopter hovers with brother Willis at the controls.
THE SCHEUTZOW STORK
Owing the past 75 years the cost of flying has continually escalated, keeping sport flying beyond the reach of the average person the font launched aircraft movement which benefits immensely from FAA non-regulation is a major counter-trend to aviation’s rule.
The STORK joins this movement as the first practical foot launched, direct lift, VTOL aircraft. Foot launching and structural simplicity were fundamental guidelines or creating the STORK design.
Some additional qualities not visible are the use of readily available materials, easily mastered construction skills, low initial cost, and negligible cost in learning to fly. The STORK can be described as a vertical lift system which is controlled by weight shift, with the pilot suspended in a swing seat harness.
The pilot grips a delta shaped control bar which is integrated with the landing gear in an “A” frame structure. Separate left and right hand twist grips mounted on the control bar provide for throttle and tail rotor pitch control. The helicopter configuration used is the single man lifting rotor and Sikorsky tail rotor arrangement.
In flight the STORK is supported on a column of downward moving air which can be directed for control and propulsion.
The difference, as compared with a conventional helicopter, is that the pilot uses his/her own body weight movement to apply control movements to the rotor hub causing the rotor tip path plane to take a desired position, thereby directing the air column and its thrust vector.
Because of their large size, conventional helicopters employ complex mechanical and hydraulic devices to produce essentially the same result through a swash plate cyclic control mechanism.
Ihe STORK rotor hub incorporates a feature which automatically adjusts rotor blade pitch to autorotation setting required far reduced power, or power off, gliding operation. With a low disc loading in the area of 1.1 pounds per square foot, comparable to hang glider wing loading, power-off autorotation characteristics will indeed be docile.
The STORK requires no runway, is capable of flying out of a small place, can fly forward, backward, sideways, and make pivot turns over a spot. The engine used in the prototype is the standard 440 cc snowmobile engine rated at 38 horsepower by Kawasaki with its standard intake system and extractor-muffler installed.
The muffler is designed to meet EPA noise level requirements and therefore provides relatively low Db levels. Using the engine and it’s matching components developed for snowmobiles provides a high order of reliability without the cost and risk of doing engine development work whilst gaining experience with the helicopter.
In addition to the intake and exhaust systems, Kawasaki and other builders of similar blower cooled engines, have electric starting kits and C.D.I. ignition. These engines are available through local dealers however, discussions are under way with sources that can supply engines in quantity.
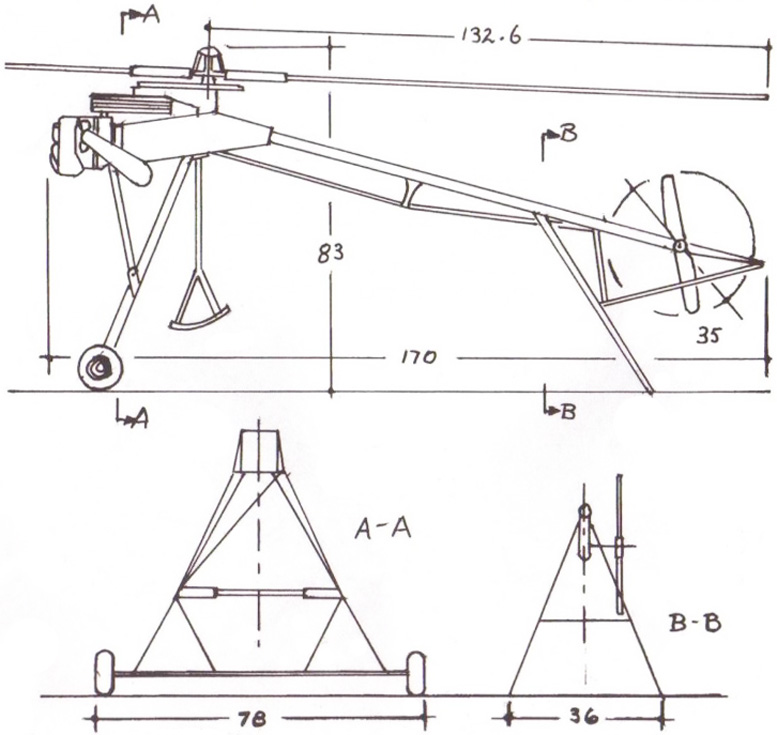
Ihe maim rotor blades are military surplus all metal Hughes OH-6 helicopter blades, modified to suit the STORK application. Tail rotor blades are wood, obtained to specification from a propeller maker. Main rotor is 22 feet in diameter and tail rotor diameter is 35 inches.
Ihe two stage rotor drive system has a “V” belt first stage and a chain drive second stage. A standard sprag type overrunning clutch provides rotor disengagement for automation flight. The “T” bell drive also functions as a clutch through a lever arrangement which permits disengaging the rotor while starting the engine.
FLYING THE STORK
After installing his/her swing seat harness, the pilot starts the engine and when ready manually engages the clutch, tensioning the “V” belt system, and gradually brings the rotor up to speed.
In a standing position, as the pilot advances the throttle. The aircraft becomes airborne above him/her. Using the control bar and his/her body weight to ground fly the aircraft the pilot positions the rotor for takeoff, increases power, and lifts off into a hover.
Holding a hover the pilot can air taxi a few feet above the ground, gaining experience in handling techniques and control response. Advancing the throttle a small amount and pulling in the control bar, the pilot accelerates forward and proceeds to climb out. Design maximum speed is fifty miles per hour, and fuel consumption is less than two gallons per hour.
Approach and landing is typical of most aircraft. The pilot sets up a steady rate of decent at a stable airspeed using a reduced throttle setting.
As the pilot approaches the predetermined landing spot, beginning at a height of about twenty-five feet, the control bar is pushed out to initiate a flare, then levels, stabilizes and establishes a three foot hover.
If preferred, one can flare and level out into a stand up landing, or touch and go. A coordinated throttle reduction immediately grounds the airframe.
Learning to fly the STORK shall be accomplished through coaching and self teaching. In forward flight above twenty miles per hour, the helicopter handling qualities are very much like a fixed wing aircraft, that is, the pilots work load diminishes flight characteristics become more two dimensional than three dimensional.
TECHNICAL CONSIDERATIONS
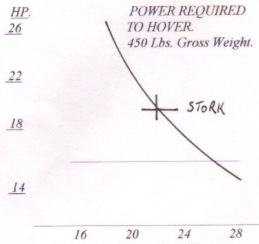
The STORK development was started as a deliberate effort to design the lightest, simplest, most efficient helicopter conceivable. The first approach was to make a power to weight study. Instead of basing a design on a preconceived minimum weight, the study was made using a readily available engine of adequate power.
The data looks like this:
The direct result of this study was the STORK concept, a foot launchable aircraft that picks up it’s pilot instead of vise versa.
New ingredients are the use of weight shift for control, a swing seat pilot suspension, the integrated control bar and landing gear, special rotor hub features and the overhead structural arrangement with dual tail skids and guarded tail rotor.
The design is novel and unique, enough so that patents are being filed. With 38 horsepower installed, STORK is provided with a great deal more than the 20 horsepower required to hover.
Power available is more than twice the power required in forward flight at 35 to 40 miles per hour. This large power margin provides reliability, maneuverability, gross weights to 500 Lbs, and operations in higher altitude regions, the engine is known to provide 600 hours of service at an average 25 horsepower.
Investigation of stability and control qualities indicates long period oscillation characteristics suitable for weight shift control. A 170 lb. pilot in the full forward position will produce a maximum forward speed of 50 miles per hour in level flight.
The FAA has been contacted regarding exemption from regulation, there has been no response to date arid there probably will be none. The STORK helicopter is foot launchable in every respect, and as such it is entitled to the same hands-off treatment as any other foot launchable aircraft.
DIMENSIONAL DATA
VIDEO: Scheutzow BEE Promotional Video
An amazingly different take on the typical helicopter rotor mechanics…..and it works! Must say – I love the innovation.
Low-cost Helicopter
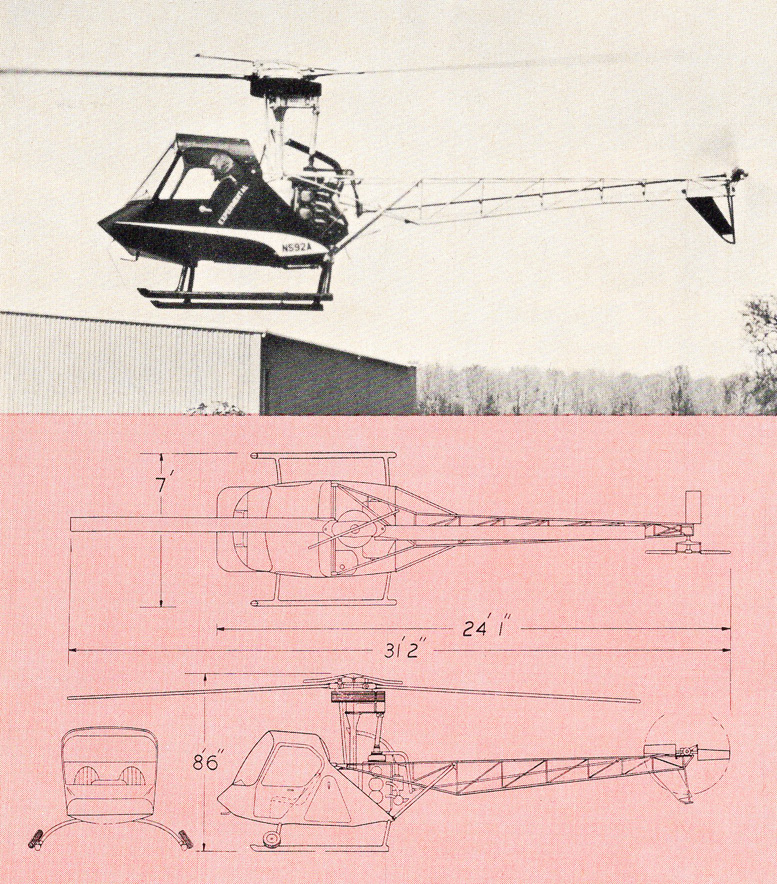
The Scheutzow Helicopter Corp, of Columbia Station, Ohio, hopes to get FAA certification next year for its Model B two-seat light weight, low-cost helicopter, and to produce 191 of the type for sale in 1969. A belt-driven Flexhub system designed and patented by Mr Webb Scheutzow eliminates the need for a gearbox.
Empty weight is 1,0001b, and gross weight is 1,5501b. Max speed is 85 m.p.h. and hovering in ground effect is possible at up to 10,000ft. The price is expected to be $16,700 (£7,000) ex-works.
The aircraft was designed by Webb Scheutzow around a new type of rotorhead that he had developed, the FLEXIHUB. In this system, the two main rotor blades were mounted in rubber bushes, reducing vibration and requiring no lubrication.
The design was otherwise entirely conventional, consisting of a cabin with two seats arranged side-by-side, a centrally-mounted engine and rotor mast, and an open-truss tail boom of triangular section that carried a two-blade tail rotor. The undercarriage consisted of skids.
The frame was constructed of welded steel tube and the cabin was constructed of sheet metal. Power was transmitted from the engine to the rotor by a series of belts, eliminating the need for a gearbox and minimizing cabin noise.
| Scheutzow Bee Helicopter Specifications | |
|---|---|
| Crew | 1 pilot |
| Capacity | 1 passenger |
| Length | 31 ft 2 in (9.50 m) |
| Main rotor diameter | 27 ft 0 in (8.23 m) |
| Height | 8 ft 6 in (2.59 m) |
| Main rotor area | 573 ft2 (53.2 m2) |
| Empty weight | 1,135 lb (514 kg) |
| Gross weight | 1,685 lb (764 kg) |
| Powerplant | 1 × Lycoming IVO-360-A1A, 180 hp (134 kW) |
| Maximum speed | 94 mph (150 km/h) |
| Range | 175 miles (280 km) |
| Service ceiling | 13,000 ft (1,960 m) |
Scheutzow Model A Helicopter
-
COMPANY: (Webb) Scheutzow Helicopter Corp, Berea OH.
-
DESIGN: Flexhub
-
DATE: 1963
-
ENGINE: 85hp Continental C-85
-
ROTOR: 22’9″ (23’0″)
-
LENGTH; 18’6″
-
LOAD: 470 lbs 85/75/0
-
RANGE: 170 miles
-
UNIQUE: Blades set on rubber bushings instead of conventional ball – and roller-bearings.
Don Bailey-CW4-USA (Ret) 16.04.2010
I was the FIRST test pilot of the Scheutzow B helicopter-early 1963 at the Strongsville, OH, airport. The initial test flight made the BEREA NEWS front page [photo and article] on Thursday, April 25,1963. BYLINE-Jim Byrne – (My passenger).
I have the newspaper article/photo and several other b/w photos taken by Richard Russell-CW3 USA (Ret) on file. Russell, also made an 8mm movie of my first translational flight along the East/West runway at Strongsville airport.
The 8mm film was passed along to Webb Scheutzow (inventor) and has been unable to be located, to this day. I also had stock in the Scheutzow company. My last telephonic communication from Webb Scheutzow was late ’60s.
I think he told me that his company had been purchased by the Hunt Bros. and had been moved to Dallas, TX. I was on a special helicopter test pilot assignment (Hiller-JOH-23L) with the US Army (Corps of Engineers) in the SW. U.S. at that time. This info can be confirmed by Rich Russell(eye witness), who currently resides in Novelty, OH.
More information: Aviastar
The Scheutzow Stork
This long-legged ultralight was develobed by Webb Scheutzow after 25 years as a member of the American helicopter Society. The Stork is a weight-shift design, sometimes called a hang-copter.
Also powered by a snowmobile engine, it’s main rotor has gyro-stable qualities. It’s foot launched into a hover. The Stork is between the rotorcycle and the back-pack helicopter designs. It’s designed to carry a useful load of 250 pounds, but the designer feels it capable of lifting even heavier loads.
The Stork’s main rotor blades are mounted “riged-in-plane” using offset flapping hinges with a “delta-three” angle. This is truly a low-cost helicopter. A quick assembly kit that can be produced at motorcycle prices.

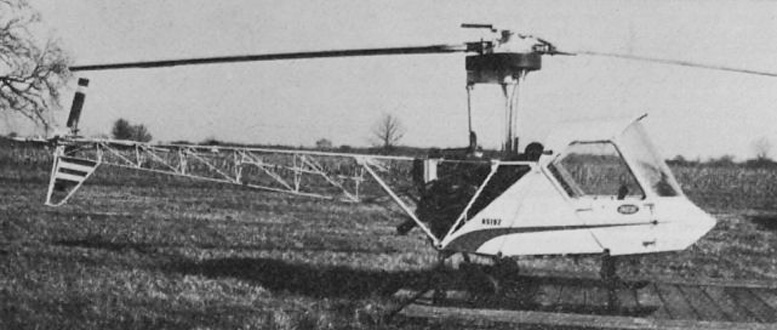
Scheutzow Model B two-place utility helicopter used 180-hp Lycoming, won FAA Type Certificate.
VISIT Wikipedia for more information.
Webb sadly passed away at Sun and fun 1982.
1968 Aeronews
THE HELICOPTER PRICE WAR has been entered by Scheutzow Helicopter Corp. of Columbia Station, Ohio with their two-place Model B at $16,700. Power is a fuel-injected Lycoming IVO-360, max speed 85-mph, load 550-lbs, range 175-miles.


Be the first to comment on "Scheutzow Stork Foot-Launched Helicopter"