

The Evolution Of Rotary Wing Flying Machines
Whirlybirds, choppers, fling wings…
LONG BEFORE THE Wright Brothers first flew at Kitty Hawk, backyard homebuilders were experimenting successfully with rotary-winged aircraft capable of vertical takeoff and landing.
Earliest examples of such devices were the Chinese tops; their origins are lost in antiquity, but they were well-known long before Leonardo da Vinci’s vertical-lift airscrew models of 1490 AD.
Leonardo da Vinci’s 1490 design for a helicopter-type flying machine was first recorded proposal for roforcraft.
First successful rotary-wing models of record were built in France in 1784 by Launoy and Bievenu, only one year after the Montgolfier brothers opened the air age with their hot-air balloon ascensions at Annonay.
In 1794, a young English experimental aircraft builder, George Cayley, also built a successful model rotary-wing craft, and in 1840 Cayley built a larger one that flew on steam power. These early steps were tentative at best, and not until 1907 did two other Frenchmen, Louis Charles Beguet and Paul Cornu, achieve the first man-carrying flights in such craft.

Chinese top is earliest concept for a rotorcraft as shown in this 15th century painting of Da Vinci’s time.
Other experimenters in Germany and the United States continued working toward the goal of successfully controlled flight in rotorcraft, which finally was achieved in 1930 when an Italian inventor named d’Ascanio flew a coaxial helicopter whose rotor blades were controlled by means of small tabs on the trailing edges of the blades.
Benjamin Franklin was among the first tinkerers to conceive of a vertical-lift machine, consisting of feathered, umbrella-shaped blades worked up and down in ornithopter fashion by the pilot’s legs, an arrangement further developed in a patented airship design by Leroy Haines of Colchester, Illinois, in 1907.
Haines employed two umbrella-shaped propellers of 20 blades each, which could be tilted from side to side in respect to each other “to cause the ship to be elevated or depressed at one side.”
In 1910 Custave H Brekke of Seattle, Washington, was granted a U.S. patent for a rotorcraft with coaxial rotors that swung in opposite directions, the lower blades larger than the upper blades These efforts were typical of numerous others that failed to work.
The secret of successful rotorwing flight would be discovered by Juan de la Cierva, Spanish inventor of the Autogiro, forerunner of today’s gyroplane rotorcraft, who began building experimental aircraft as a teenager in 1911 In that year Cierva and a pal built two gliders, and in 1912, built the first Spanish airplane to fly.
In 1918, as a student civil engineer, Cierva designed and built the world’s first three-engine tractor airplane On a test flight, this remarkable craft stalled and spun in during a turn, convincing Cierva that rigid-wing aircraft would never be flown safely except by professional pilots.
A close associate of Cierva, Professor J.A.J. Bennett of England’s College of Aeronautics, in 1960 delivered a lecture before the Royal Aeronautical Society on Cierva’s work; this was reprinted in the Popular Flying Association’s house organ for May-June 1979.
Professor Bennett reveals that Cierva was so shaken by the crash of his trimotor that he turned to development of either helicopter or ornithopter aircraft. He finally considered both too complex, and believed that the successful rotorcraft must have wings moving with a velocity relative to that of the framework, the relative motion maintained independently of mechanical power.

Pitcairn C-8 autogyro had four rotor blades, prespun through a clutch by power from main radial engine up front.
Approaching the problem mathematically, he settled on a configuration using two coaxial rotor systems turning in opposite directions, much like Brekke’s design, but experimentation showed it wouldn’t work as he had hoped — the coaxial rotors did not behave identically due to unequal flow conditions at the two rotors.
Trying again with.a single rotor disc, Cierva encountered a new problem — a lateral imbalance caused by the dissymetry of the relative velocities of the two sides of the disc.
Said Professor Bennett: “By giving the blades a further degree of freedom, so that they could rise and fall freely about a hinge in response to variation of relative velocity and therefore of lift, he realized that he had solved at a stroke the main difficulty associated with the use of only one rotor.”
“He was unaware that helicopter blades had previously been hinged at their root for another purpose, namely to relieve bending stresses The use of a flapping hinge to compensate for the dissymetry of periodic lift in a single rotor was, however, an original discovery, as helicopters required two rotors for torque balance.”
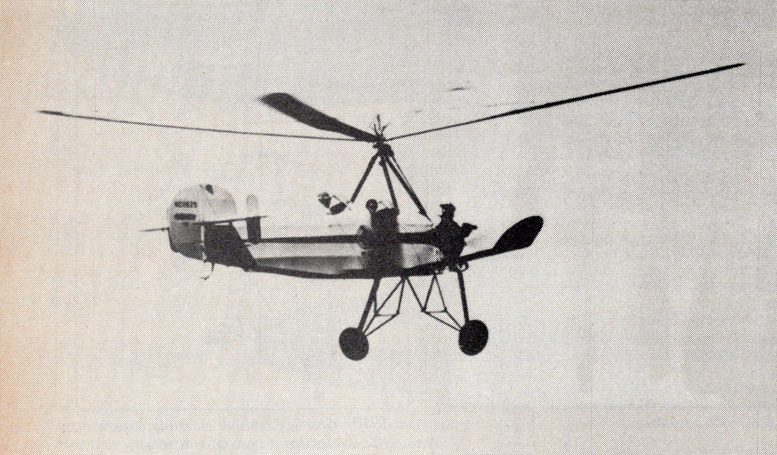
Pitcairn autogyros got a boost from aviatrix Amelia Earhart when she flew one coast to coast, setting an altitude record.
Professor Bennett, who worked with Cierva Autogiro Company for 10 years, explained in his Cierva lecture a little known principle of operation of gyroplanes:
“The Autogiro,” he said, “is basically a powered glider with rotating wings. The whole of available power being applied to a forward propeller, the necessary translational speed is maintained to keep the rotor revolving at zero torque.”
“A large proportion of the rotor blade, acting as a windmill, absorbs sufficient energy from the air to propel the remainder of the blade. In vertical descent, the tip portion of the blade is acting in the helicopter state, expending energy on the air.”
“The resultant thrust in steady flight is along the axis of rotation, because otherwise the rotor would not rotate at a constant speed. If the rotor tends to slow down, the increased upward flow through the rotor, due to the greater sinking speed, increases that windmill portion of the blade, and the rotor is thereby accelerated.”
“Conversely, if the rotational speed becomes excessive, the helicopter portion of the blade, where the flow is downward, increases in length, due to the slower speed of descent, and the rotor decelerates. Thus there is a continuous exchange of energy between the windmill portion of the disc, where energy is absorbed from the air, and the helicopter portion, where energy is expended on the air.”
In forward flight, a gyroplane, being fundamentally a rotor-wing glider towed by a propeller, must descend whenever the towing propeller’s force ceases in still air such a rotorcraft can take off or land with no forward run by utilizing the kinetic energy stored in the rotor, as in a so-called “jump takeoff.”
Curiously, according to Professor Bennett, most helicopters designed to date have not utilized their ability to climb vertically except within the ground cushion, and have merely reduced to slow-motion the Autogiro’s takeoff procedure.
In defense of the gyroplane principle over that of the helicopter, Professor Bennett maintained;
“Momentary hoverability as in the Autogiro, assisted by the kinetic energy of the rotor, in contrast with the continuous hoverability of the helicopter, has a number of advantages, not the least of which is ease of control Control of a helicopter becomes relatively more complicated by the existence of rotor torque, which requires compensatory simultaneous movement of all controls due to their interdependence.”
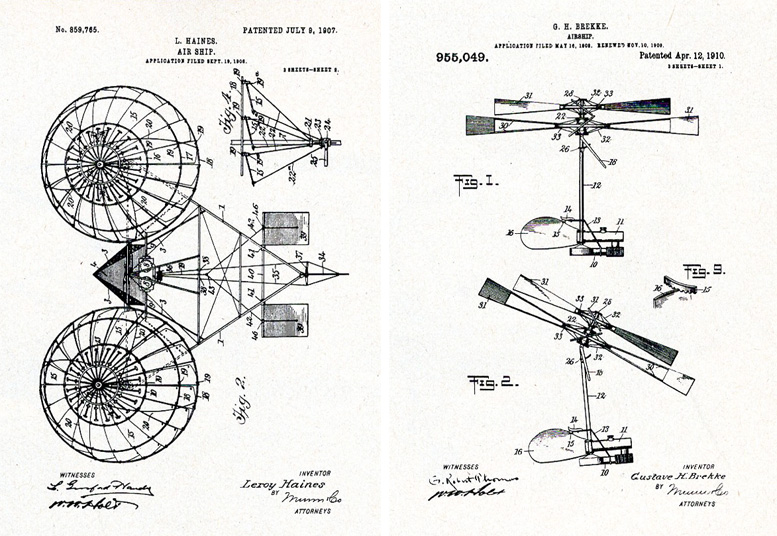
LEFT: Leroy Haines in 1907 patented this unusual Air Ship Design with tilting umbrella-shaped rotor blades.
RIGHT: In 1910 inventor Custave H. Brekke won a U.S. Patent for a coaxial rotorcraft.
The blade-flapping mechanism invented by Cierva also is the basic means of control for helicopters Varying the applied load by means of cyclic pitch change or feathering causes the rotor disc to tilt relative to the shaft.
Since the thrust is substantially perpendicular to the rotor disc, tilting the rotor relative to the helicopter produces forces that make the craft move in any desired direction. The change in angle of attack on the advancing and retreating sides of the helicopter’s rotor disc inherently limits its speed and is a serious limitation on its greater utility.
As forward speed increases, the angle of attack on the retreating side must increase until stalling occurs, thus limiting the craft’s forward speed to about four-tenths that of the rotational speed, or roughly 200 mph.
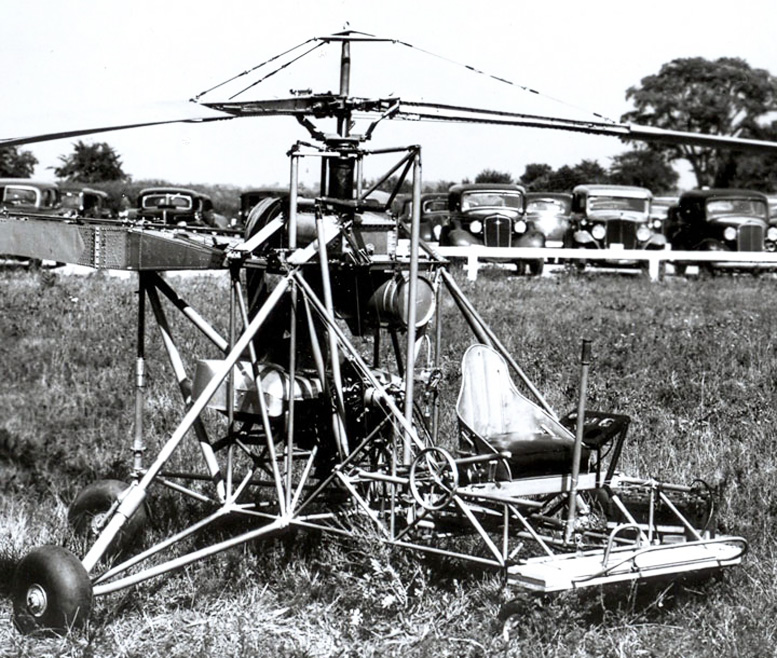
The world’s first successful helicopter flight was made on September 14, 1939, by Igor Sikorsky in his “Ugly Duckling” just 40 years ago! Sikorsky in 1964 told members of the Wings Club in New York.
“My interest in flying machines goes far back to the end of the last century when, as a 10-year-old boy, I tried to make flying models and once even succeeded in building a fairly large rubber-driven model of a helicopter with about a 30-inch rotor diameter.”
In 1909 Sikorsky traveled from his home in Kiev to Paris, the world center of aviation, then returned home inspired to build his first man-carrying helicopter; unfortunately it wouldn’t fly He moved to America in 1919 after the revolution, organized the Sikorsky Aero Engineering Corporation, and began building passenger transports of the rigid-wing type.
Then in the spring of 1939, on the eve of World War II, he designed the Ugly Duckling VS-300 helicopter, which did fly. It had a 75-hp air-cooled engine, a three-bladed main rotor 29 feet in diameter and a tail rotor hung at the end of an open framework, supported on two main wheels and a tail wheel.
It was in 1939, incidentally, that the homebuilt rotorcraft movement was launched when Igor Sikorsky and Dr Igor B Bensen, whose families were neighbors in Kiev, met face to face Bensen had hoped to join Sikorsky in helicopter work, but World War II intervened Instead.
Bensen joined the General Electric Company as a research engineer in the field of rotary-wing development Bensen’s meeting with Sikorsky had a lasting effect on his career, and when he left General Electric in 1951 he became chief engineer for the Kaman helicopter firm.
Two years later he launched his own business, the Bensen Aircraft Corporation, in Raleigh, North Carolina His goal: to develop a mass-producible “People Flying Machine” capable of door-to-door transportation.
As the Korean War wound down, anticipated heavy military orders for a ramjet-powered Model 5 Helicopter failed to materialize. But coincidentally, Boy’s Life Magazine published a photograph of Bensen flying his first Gyro-Glider described as “so simple to build and fly, any high-school boy could master it.”
Overnight, Bensen found himself swamped with requests for plans and kits for a homebuilt Gyro-Glider, so he removed the ramjets from his B-5 military helicopter and converted it to a Gyro-Glider.

Since then Bensen estimates, more than 4000 Model B8M Gyrocopters have been built, with half of them still flying — making it the most popular of all homebuilt aircraft. By contrast, the general aviation fleet of commercial rotorcraft numbers roughly 7000, mostly derivatives of military designs.
To meet the growing boom in rotorcraft flying, the FAA has recently begun to overhaul its regulations concerning operation and certification of such craft, which heretofore had been based on those for fixed-wing aircraft and so did not reflect the unique capabilities of whirlybirds. including vertical and IFR flight.
Among the smaller firms moving into the action are Robinson Helicopter Company of Torrance, California, with their R-22, and Eagle Helicopter Corporation of Grand Island. Nebraska, with their air-jet rotor- and tip-mounted jet Eagle helicopters.
The latter utilizes small jets at the tips of each blade designed by Eugene Gluhareff of Gardena, California, who already had applied the devices to such contraptions as Rogallo wing hang gliders.
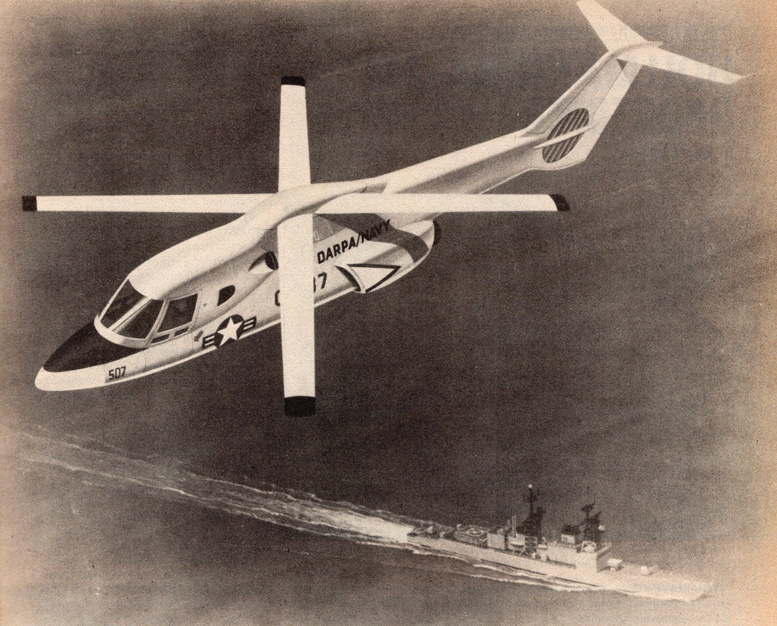
Lockheed’s revolutionary new X-wing rotorcraft (1979) is designed to lock its blades and go to transsonic flight.
An exciting development worth noting is Lockheed’s new X-wing research helicopter, which recently underwent six weeks testing in the big wind tunnels at NASA Ames Research Center.
The design is based on circulation-control rotor technology studies developed at the Naval Ship Research and Development Center. These studies show that when blown air is circulated over the rounded trailing edge of the X wing, it generates lift and control that can be varied in all three axes of flight.
Such an X-wing aircraft could take off and land vertically, and in high-speed helicopter flight (about 200 mph) the pilot can stop and lock the rotating wing, then accelerate to transsonic speeds for fixed-wing flight. For the homebuilder there are many more rotorcraft designs to consider, so click on the pages and enjoy!
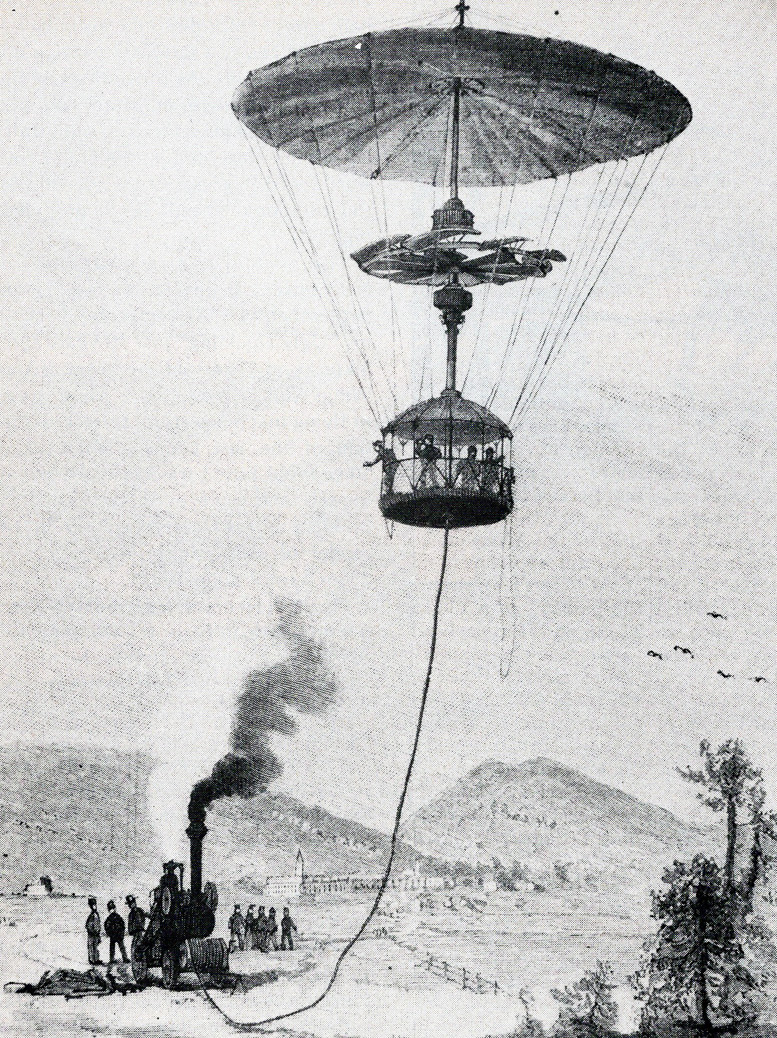
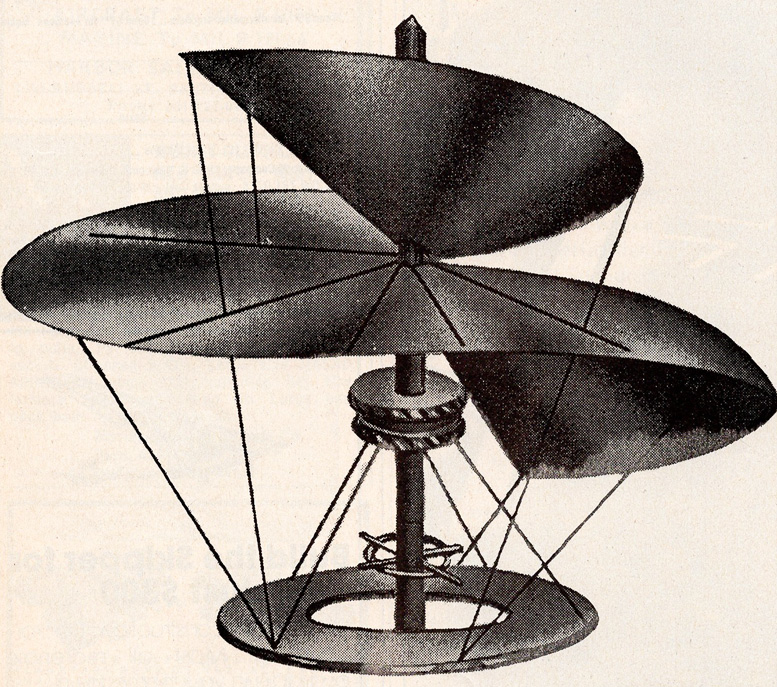
A tethered rotorcraft design made news 140 years ago, using steam power to raise spectators into the high sky.




Be the first to comment on "The Rotorcraft Story"